利用VRT技术实现高速度和高精度,同时保持设计灵活性
振动问题是机器人控制技术面临的挑战之一。振动幅度与机器人的运动速度成正比,并且会对支撑底座和周围设备产生不利影响。同时,制造商需要机器人以更快的速度动作,以缩短生产线完成每道工序的时间。
爱普生开发的VRT技术(Vibration Reduction Technology)能最大限度发挥爱普生机器人的性能。VRT通过控制机器人的动作方式来降低支撑底座、末端执行器、相机和其他部件的振动幅度。VRT还可以最大限度地减少机器人运动引起的振动,降低系统设计成本,提高设计灵活性。
提高机器人速度面临的挑战
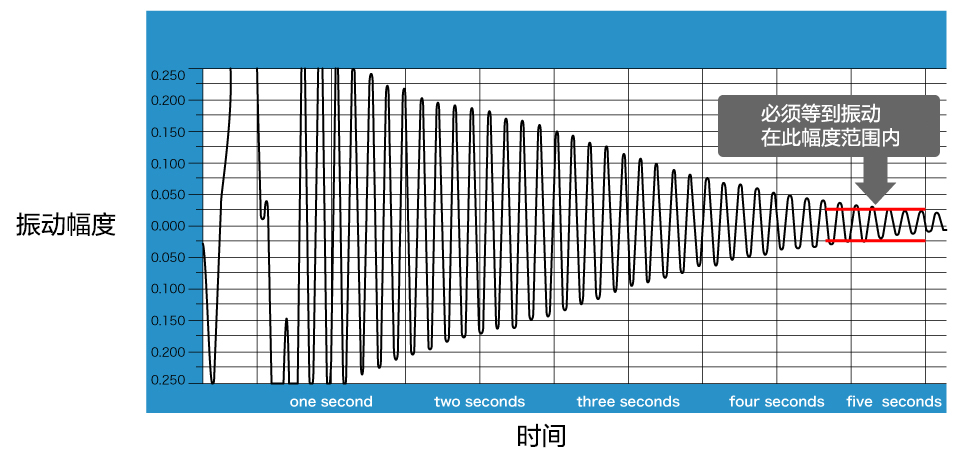
制造商希望在保证产品质量的前提下缩短每道工序的时间,进而提高产能。这就需要高速度和高加速度动作的机器人。然而,机器人运动得越快,产生的振动就越大,停止后余振也会越大。不仅机器人本身会振动,用于固定机器人的支撑底座以及安装在机器人上的任何传感器、相机和其他器件也会振动。
即使机器人本身的余振很小,支撑基座中的大量余振也会使机器人难以高速运行或进行高精度定位。而如果机器人必须等到余振消失才能维持精度,则完成每道工序所需的时间就会增加。传感器和相机的振动也会增加检测数据出错的概率,导致产品质量不佳。
制造商真正需要的技术是在保持机器人高速运转的同时减少机器人和外围设备的振动,从而最大限度地提高整个制造系统的性能。
减少振动的方法及相关问题
减少机器人振动和提高机器人精度通常采用如下方法。
• 以低速和低加速度移动机器人。
• 增加手臂的刚度,减轻有效载荷的重量。
• 增加支撑底座的刚度,并将机器人紧紧地固定在支撑底座上。
• 使用缓冲材料防止振动延伸到周围
减缓机器人的运动速度将减少振动,但无法缩短循环时间。增加机械臂和支撑底座的刚度也会引发一系列问题,如增加成本,限制了机器人的安装位置等。
如果机器人是悬挂在框架上的,通常使用高刚性的焊接铁支撑底座将振动降低到可接受的水平。然而,制作带有铁架的焊接支撑底座需要时间和成本,且其高度不可调,无法轻易进行改装。带有铝架的铝质支撑底座容易制作,但铝缺乏刚性,会导致支架不稳定,需要时间来稳定机器人操作过程中产生的残余振动。最后一种方法是使用缓冲材料,但在空间利用效率方面并不太理想。
引入VRT的优势
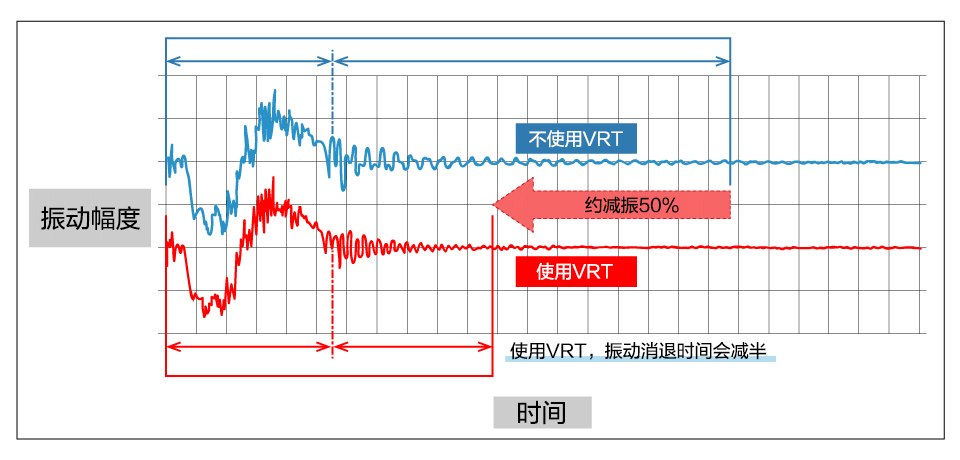
VRT根据支撑底座、末端执行器、相机和其他部件的特性来控制机器人的动作方式,从而降低这些部件的振动幅度。当振动幅度较大的机器人悬挂安装在框架上时,这项技术尤为有效,振动幅度有可能降低约90%。
VRT的优势
• 减少机器人振动并实现快速、准确的动作
• 显著缩短等待残余振动消退的时间,有助于缩短周期时间
• 通过减少包括支撑底座在内的所有设备的振动来提高生产率,同时降低成本
• 提高机器人安装和系统设计的自由度,同时无需在支撑底座设计上花费额外时间和成本。
VRT可节省空间并实现高速度和高精度,最大限度地提高了爱普生机器人的性能,并有助于提高生产线的产能。










